dsp2812 实现三相异步电动机FOC控制方案.docx |
您所在的位置:网站首页 › tomato potato顺口溜 › dsp2812 实现三相异步电动机FOC控制方案.docx |
dsp2812 实现三相异步电动机FOC控制方案.docx
|
dsp2812 实现三相异步电动机FOC控制方案.docx 《dsp2812 实现三相异步电动机FOC控制方案.docx》由会员分享,可在线阅读,更多相关《dsp2812 实现三相异步电动机FOC控制方案.docx(15页珍藏版)》请在冰豆网上搜索。
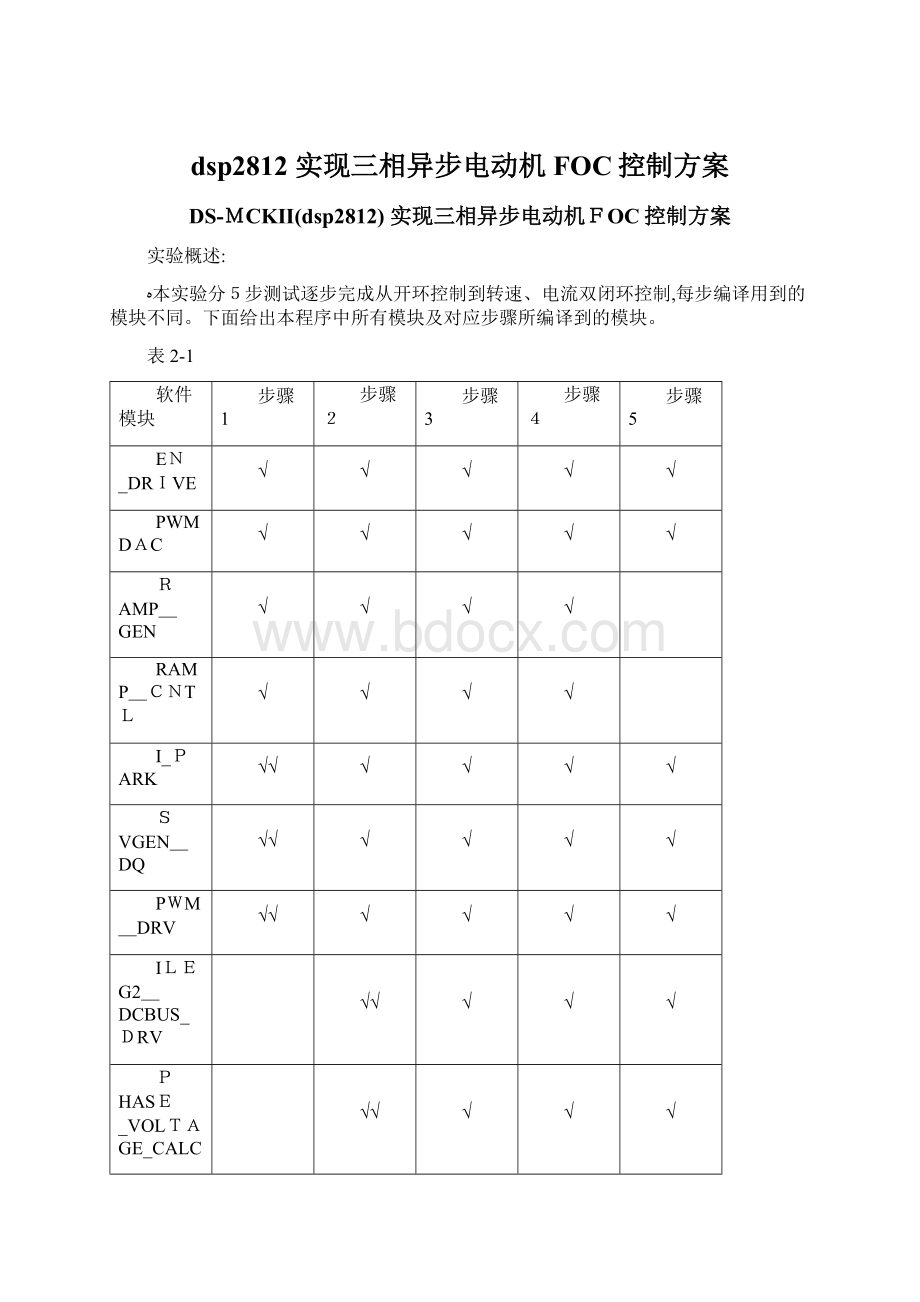
dsp2812实现三相异步电动机FOC控制方案 DS-MCKⅡ(dsp2812)实现三相异步电动机FOC控制方案 实验概述: ﻩ本实验分5步测试逐步完成从开环控制到转速、电流双闭环控制,每步编译用到的模块不同。 下面给出本程序中所有模块及对应步骤所编译到的模块。 表2-1 软件模块 步骤1 步骤2 步骤3 步骤4 步骤5 EN_DRIVE √ √ √ √ √ PWMDAC √ √ √ √ √ RAMP_GEN √ √ √ √ RAMP_CNTL √ √ √ √ I_PARK √√ √ √ √ √ SVGEN_DQ √√ √ √ √ √ PWM_DRV √√ √ √ √ √ ILEG2_DCBUS_DRV √√ √ √ √ PHASE_VOLTAGE_CALC √√ √ √ √ CLARKE √√ √ √ √ PARK √√ √ √ √ CAP_EVENT_DRV √√ √ √ √ SPEED_PR √√ √ √ √ PID_REG3(ID) √√ √ √ PID_REG3(IQ) √√ √ √ CUR_MOD √√ √ PID_REG3(SPEED) √√ 图标√表示本步骤用到此模块,图标√√表示本步骤要测试的模块 下面再给出每个模块的输入与输出量名称及其量值格式 表2-2 软件模块 输入量 输出量 名称 格式 名称 格式 EN_DRIVE EnableFlag Q0 GPIOA6 GPIOA11 GPIO 寄存器 PWMDAC_DRV PWMDACINPOINTER0 PWMDACINPOINTER1 PWMDACINPOINTER2 Pointers toQ15variables CMPR4 CMPR5 CMPR6 T3PER EVB寄存器 RAMP_GEN Freq Offset Gain IQ Out IQ RAMP_CNTL TargetValue IQ SetpointValue IQ I_PARK Ds Qs Angel IQ Alpha Beta IQ SVGEN_DQ Ualpha Ubeta IQ Ta Tb Tc IQ PWM_DRV MfuncC1 MfuncC2 MfuncC3 MfuncPeriod Q15 CMPR1 CMPR2 CMPR3 T1PER EV registers ILEG2_DCBUS_DRV ADCINx/y/z ADCH/Wpins ImeasA ImeasB ImeasC VdcMeas Q15 PHASE_VOLTAGE_CALC MfuncC1 MfuncC2 MfuncC3 DcBusVolt IQ VphaseA VphaseB VphaseC Valpha Vbeta IQ CLARKE As Bs IQ Alpha Beta IQ PARK Alpha Beta Angle IQ Ds Qs IQ CAP_EVENT_DRV CAPn EVH/Wpin FIFOn Ev寄存器 SPEED_FR TimeStamp EventPeriod InputSelect IQ Out IQ PID_REG3 Ref Fdb IQ Out IQ CUR_MOD Ids Iqs Wr IQ Theta IQ (一)、FOC控制原理简介 FOC即磁场定向控制,它的基本思路是利用d-q旋转坐标变换,将定子电流分解成励磁电流Ds 和转矩电流Qs。 在调速的过程中保持转子磁链ψ2 不变,即让Ds=常数,此时,交流电动机的调速原理与直流电动机相同,控制定子电流的转矩分量Qs就象控制直流电动机的电枢电流,可以线性的调节交流电动机的输出转矩。 (二)、系统组成方案及功能模块划分 系统包含15个软件模块,下图给出了步骤5中系统的功能模块划分和模块间的相互关系。 图2-1 (三)、系统测试步骤和方法 步骤1、步骤1矢量计算和PWM生成测试实验 图2-1-1给出了实验程序功能框图,图2-1-2给出了实验程序的软件流程。 本步骤完成最小系统检查的任务,其中只用到表2-1步骤1中标记的功能模块。 以下给出步骤1中的控制参数及其调节范围 EnableFlag: 0、1;启停控制位 SpeedRef: (0~0.99);速度给定值 VdTesting: (0~0.9);D轴电流给定 VqTesting: (0~0.9);Q轴电流给定 图2-1-1实验功能框图 图2-1-2 实验软件流程 在实时模式下打开watchwindow窗口的Build1标签改变SpeedRef输入参量的值,从而改变斜坡信号和正弦波的频率。 在实时模式下修改watch window窗口中的VdTesting、VqTesting值,可以改变输出正弦波的幅值。 对应VdTesting等效直流电机中的励磁给定,VqTesting直流电机中的转矩给定(即电枢电压给定)。 利用图形显示功能观测输出量Ta、Tb、Tc和Ta-Tb的波形随输入参数改变的变化情况。 首先按操作规范完成“仿真器和实验箱”或者“仿真器和TechVCPU板”的连接,并接通它们的电源,在不连接功率单元的情况下先测试PWM输出是否正确。 操作方法是: 启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL1” ;然后重新编译连接程序;加载并在实时模式下运行(RUN)编译完成的“aci3_3.out”程序;Watchwindow选中Build1标签,将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。 设置EnableFlag值为1。 启动程序。 改变SpeedRef、VdTesting、VqTesting值,观测图形显示窗口波形变化如下。 图2-1-5Ta和Tb波形 图2-1-6Tc和Ta-Tb波形 步骤2、电流、直流母线电压、速度测试 此步骤在步骤1的基础上增加对电压、电流采样模块、clarke/park变换模块、速度测量计算模块的测试。 图2-2-1给出了实验程序功能框图,图2-2-2给出了实验程序的软件流程。 以下给出步骤2中的控制参数及其调节范围 EnableFlag: 0、1;启停控制位 SpeedRef: (0~0.99);速度给定值 VdTesting: (0~0.6);D轴电流给定 VqTesting: (0~0.6);Q轴电流给定
图2-2-1“步骤二”功能框图 图2-2-2“步骤二”软件流程 在实时模式下打开watchwindow窗口的Build2标签改变SpeedRef输入参量的值,从而改变斜坡信号和正弦波的频率。 在主电路电源打开的情况下、电机空载转速在SpeedRef=0.99时可达到1450转/分。 在实时模式下修改watch window窗口中的VdTesting、VqTesting值,可以改变输出正弦波的幅值。 对应VdTesting等效直流电机中的励磁给定,此步中为定值0.25。 没有特殊情况可不改变此值。 VqTesting直流电机中的转矩给定,空载时给0,当电机带负载后可适当增加。 注意VqTesting、VdTesting越大电机电流越大。 可观察图形显示窗口中的Channal3&4中Ia和Ib电流的幅值,当其正弦波电流畸变为非正弦时说明VqTesting、VdTesting给定已经超出允许范围,应立即停止电机! 在实验过程中不要长时间给定很大值使电机工作。 首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。 启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build” 文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL2”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;选中Watch window Build2标签将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。 设置EnableFlag值为1。 启动程序。 改变SpeedRef、VdTesting、VqTesting值,观测图形显示窗口波形变化。 此时如果逆变电路正确,则电机缓慢启动,并逐渐达到给定转速;在实时模式下修改SpeedRef的值(0~0.99),相应电动机的转速发生变化。 为下一步实验测量Id的PID限幅值: 测量Id的PID限幅值: SpeedRef=0.5使VqTesting=0,增加VdTesting直到图形显示中Ta的幅值为1,此时的VdTesting值即为下一步中IdPID的即幅值(±0.6)。 注意: 同步骤一一样VdTesting、VqTesting不要给太大值使电机长时间工作。 观测Ta、RMPGENoutput、Ia、Ib的波形。 图2-2-3Ta和RMPGEN output 图2-2-4Ia和Ib 步骤3、两个电流PI调解器测试 在步骤2的基础上增加对DQ轴电流调节模块功能的测试和转速测量。 进行本试验前要首先完成以上两步实验,将电流反馈信号整定好。 图2-3-1给出了实验程序功能框图,图2-3-2给出了实验程序的软件流程。 以下给出步骤3中的控制参数及其调节范围 EnableFlag: 0、1;启停控制位 SpeedRef: (0~0.99);速度给定值 IdRef: (0~0.6);D轴电流给定 IqRef: (0~0.6);Q轴电流给定 图2-3-2“步骤3”软件流程 此步除调整以上参数以外可以在主程序aci3_3.c中找到初始化Id的PID_REG3和Iq的PID_REG3,改变其比例、积分、微分参数。 使电机获得更加好的的启动过程。 首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。 启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build” 文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL3”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;选中WatchwindowBuild3标签,将图形显示窗口Channal1&2、Channal3&4、watchwindow改为连续刷新。 设置EnableFlag值为1,启动程序。 改变SpeedRef、IdRef、IqRef值,观测图形显示窗口波形变化。 此时如果参数给定正确,则电机缓慢启动,并逐渐达到给定转速;在实时模式下修改SpeedRef的值(0~0.99),相应电动机的转速发生变化。 观测Ta和RMPGENoutput、Ia和转速如图所示: 图2-4-3Ta和RMPGENoutput 图2-4-4Ia和转速 注意: 同步骤一一样IdRef、IqRef不要给太大值使电机长时间工作。 图2-3-1“步骤3”功能框图 步骤4、电流模型测试 在步骤3的基础上增加对电流模型模块功能的测试。 电流模型模块从“PARK变换”模块和速度测量模块获取输入值,将计算得到的输出值送给“CUR_MOD模块”。 此实验前需要整定电流反馈信号。 图2-4-1给出了实验程序的软件流程,图2-4-2给出了实验程序功能框图。 以下给出步骤4中的控制参数及其调节范围 EnableFlag: 0、1;启停控制位 SpeedRef: (0~0.99);速度给定值 IdRef: (0~0.6);D轴电流给定 IqRef: (0~0.6);Q轴电流给定 qep1.CalibratedAngle: (0x0000~0xFFFF);光电编码器角度对位 图2-4-1“步骤4”软件流程 此步骤与上一步操作上是一样的,只是增加了对CUR_MOD模块的观测,实验中观测CUR_MOD模块的输出Theta的方向要与RMPGEN输出output相同。 若相反,将电机组中的光电编码器连接到电动机的另一端,从而改变光电编码器采得的旋转方向。 首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。 启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL4”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;Watchwindow选中Build4标签,将图形显示窗口Channel1&2、Channel3&4、watch window改为连续刷新。 设置EnableFlag值为1。 启动程序。 改变SpeedRef、IdRef、IqRef值, 光电编器角度对位: 使SpeedRef=0.5,转速稳定在一个值。 在watchwindow窗口Build4中空行处写入qep1.CalibratedAngle变量,并改变其值大小,观察Channel3&4中电流模型输出和RMPGEN output,使两个锯齿波的下降沿对齐(电流模型输出略滞后于RMPGENoutput),记住此时的qep1.CalibratedAngle值,停止程序,去掉实时模式,RESETCPU,在程序aci3_3.c文件中找到初始化qep1.CalibratedAngle=x;的语句,将值写入等号后,重新编译、载入程序,运行程序验证角度对位是否正确。 观测图形显示窗口波形变化如下图2-4-3、图2-4-4 图2-4-3 Ta和Ia 图2-4-4电流模型output和RMPGENoutput 图2-4-2“步骤4”功能框图 步骤5、有传感器速度闭环IFOC系统 此步骤用于测试速度调节器功能是否正确,完整电流、速度闭环控制能否可靠实现。 此步骤需要全部系统模块参与,它的正确实施要依靠前面5个步骤地正确进行。 实验前要首先进行电流反馈信号的整定。 速度调节模块从速度测量模块获取速度反馈值,速度参考值由用户给出,模块的输出作为转矩参考送给电流调节器模块。 励磁参考值由用户设定。 图2-5-1给出了实验程序的软件流程,图2-5-2给出了实验程序功能框图。 以下给出步骤5中的控制参数及其调节范围 EnableFlag: 0、1;启停控制位 SpeedRef: (0~0.99);速度给定值 IdRef: (0~0.3);D轴电流给定 图2-5-1“步骤5”软件流程 图2-5-2“步骤5”功能框图 首先,根据操作规范,对照附录二中的硬件连接图连接实验系统硬件,接通控制电源。 启动CCS软件,用“File——workspace”菜单命令打开“ACI3_3_281X\cIQmath\build”文件夹下的workspace文件“aci3_3_281x_ccs2x.wks”文件;将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL5”;用“Project——Build”菜单命令编译连接程序;编译完成后,加载并在实时模式下运行(RUN)“aci3_3.out”程序;接通主电路电源;Watchwindow选中Build4标签,将图形显示窗口Channel1&2、Channel3&4、watchwindow改为连续刷新。 设置EnableFlag值为1。 启动程序。 改变SpeedRef、IdRef值,观测图形显示窗口波形变化如下图2-5-3、图2-5-4。 图2-5-3 Ta和电流模型outp |
【本文地址】
今日新闻 |
推荐新闻 |